




अल्ट्रा हाई प्रिसिजन एमजेडएम मॉड्यूलेटर बायस कंट्रोलर ऑटोमैटिक बायस कंट्रोलर


विशेषता
• पीक/नल/क्यू+/क्यू− पर बायस वोल्टेज नियंत्रण
• किसी भी बिंदु पर बायस वोल्टेज नियंत्रण
• अति सटीक नियंत्रण: नल मोड पर अधिकतम 50dB विलुप्तिकरण अनुपात;
Q+ और Q− मोड पर ±0.5◦ की सटीकता
• कम डिथर आयाम:
NULL मोड और PEAK मोड में 0.1% Vπ
Q+ मोड और Q− मोड पर 2% Vπ
• उच्च स्थिरता: पूर्णतः डिजिटल कार्यान्वयन के साथ
• कम प्रोफ़ाइल: 40 मिमी (चौड़ाई) × 30 मिमी (गहराई) × 10 मिमी (ऊंचाई)
• उपयोग में आसान: मिनी जम्पर के साथ मैनुअल संचालन;
MCU UART2 के माध्यम से लचीले OEM संचालन
• बायस वोल्टेज प्रदान करने के दो अलग-अलग तरीके: a. स्वचालित बायस नियंत्रण
b. उपयोगकर्ता द्वारा परिभाषित बायस वोल्टेज

आवेदन
• LiNbO3 और अन्य MZ मॉड्यूलेटर
• डिजिटल एनआरजेड, आरजेड
• दालों के अनुप्रयोग
• ब्रिलौइन प्रकीर्णन प्रणाली और अन्य ऑप्टिकल सेंसर
• सीएटीवी ट्रांसमीटर
प्रदर्शन
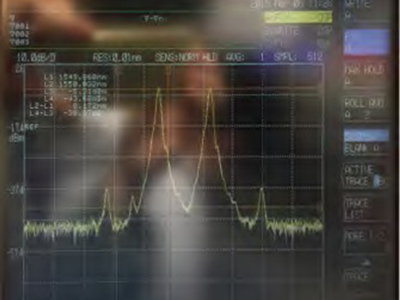
चित्र 1. वाहक दमन
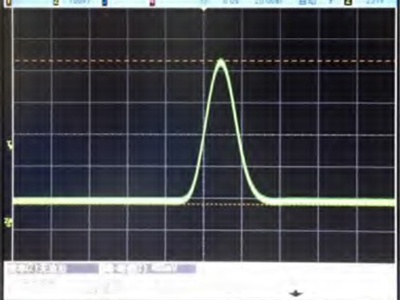
चित्र 2. पल्स जनरेशन

चित्र 3. मॉड्यूलेटर की अधिकतम शक्ति
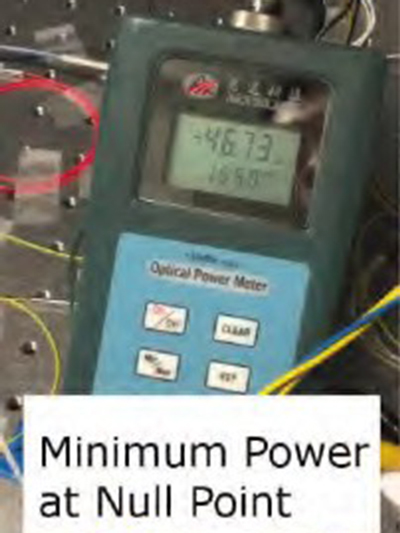
चित्र 4. मॉड्यूलेटर की न्यूनतम शक्ति
अधिकतम डीसी विलुप्ति अनुपात
इस प्रयोग में, सिस्टम पर कोई आरएफ सिग्नल लागू नहीं किया गया था। शुद्ध डीसी विलुप्तिकरण को मापा गया है।
1. चित्र 5 मॉड्यूलेटर आउटपुट की ऑप्टिकल पावर को दर्शाता है, जब मॉड्यूलेटर को पीक पॉइंट पर नियंत्रित किया जाता है। चित्र में यह 3.71 dBm दर्शाता है।
2. चित्र 6 में मॉड्यूलेटर आउटपुट की ऑप्टिकल पावर दर्शाई गई है, जब मॉड्यूलेटर को शून्य बिंदु पर नियंत्रित किया जाता है। आरेख में यह -46.73 dBm दर्शाता है। वास्तविक प्रयोग में, यह मान लगभग -47 dBm के आसपास बदलता रहता है; और -46.73 एक स्थिर मान है।
3. अतः, मापा गया स्थिर डीसी विलुप्तिकरण अनुपात 50.4 डीबी है।
उच्च विलुप्तिकरण अनुपात के लिए आवश्यकताएँ
1. सिस्टम मॉड्यूलेटर का उच्च विलुप्तिकरण अनुपात होना चाहिए। सिस्टम मॉड्यूलेटर की विशेषता यह निर्धारित करती है कि अधिकतम विलुप्तिकरण अनुपात कितना प्राप्त किया जा सकता है।
2. मॉड्युलेटर इनपुट प्रकाश के ध्रुवीकरण का ध्यान रखा जाना चाहिए। मॉड्युलेटर ध्रुवीकरण के प्रति संवेदनशील होते हैं। उचित ध्रुवीकरण से विलुप्तिकरण अनुपात में 10dB से अधिक सुधार हो सकता है। प्रयोगशाला प्रयोगों में, आमतौर पर एक ध्रुवीकरण नियंत्रक की आवश्यकता होती है।
3. उपयुक्त बायस नियंत्रक। हमारे डीसी एक्सटिंक्शन अनुपात प्रयोग में, 50.4dB का एक्सटिंक्शन अनुपात प्राप्त किया गया है। जबकि मॉड्यूलेटर निर्माता के डेटाशीट में केवल 40dB का उल्लेख है। इस सुधार का कारण यह है कि कुछ मॉड्यूलेटर बहुत तेजी से ड्रिफ्ट करते हैं। रोफ़िया आर-बीसी-एएनवाई बायस नियंत्रक त्वरित प्रतिक्रिया सुनिश्चित करने के लिए प्रत्येक 1 सेकंड में बायस वोल्टेज को अपडेट करते हैं।
विशेष विवरण
| पैरामीटर | मिन | प्रकार | अधिकतम | इकाई | स्थितियाँ |
| नियंत्रण प्रदर्शन | |||||
| विलुप्ति अनुपात | एमईआर 1 | 50 | dB | ||
| सीएसओ2 | -55 | -65 | -70 | डीबीसी | डिथर आयाम: 2%Vπ |
| स्थिरीकरण समय | 4 | s | ट्रैकिंग बिंदु: शून्य और शिखर | ||
| 10 | ट्रैकिंग पॉइंट: Q+ और Q- | ||||
| विद्युतीय | |||||
| धनात्मक शक्ति वोल्टेज | +14.5 | +15 | +15.5 | V | |
| धनात्मक शक्ति धारा | 20 | 30 | mA | ||
| नकारात्मक शक्ति वोल्टेज | -15.5 | -15 | -14.5 | V | |
| ऋणात्मक शक्ति धारा | 2 | 4 | mA | ||
| आउटपुट वोल्टेज रेंज | -9.57 | +9.85 | V | ||
| आउटपुट वोल्टेज परिशुद्धता | 346 | μV | |||
| डिथर आवृत्ति | 999.95 | 1000 | 1000.05 | Hz | संस्करण: 1kHz डिथर सिग्नल |
| डिथर आयाम | 0.1%Vπ | V | ट्रैकिंग बिंदु: शून्य और शिखर | ||
| 2%Vπ | ट्रैकिंग पॉइंट: Q+ और Q- | ||||
| ऑप्टिकल | |||||
| इनपुट ऑप्टिकल पावर3 | -30 | -5 | डी बी एम | ||
| इनपुट तरंगदैर्ध्य | 780 | 2000 | nm | ||
1. MER का अर्थ है मॉड्युलेटर एक्सटिंक्शन रेशियो। प्राप्त एक्सटिंक्शन रेशियो आमतौर पर मॉड्युलेटर डेटाशीट में निर्दिष्ट मॉड्युलेटर का एक्सटिंक्शन रेशियो होता है।
2. CSO का तात्पर्य मिश्रित द्वितीय क्रम से है। CSO को सही ढंग से मापने के लिए, RF सिग्नल, मॉड्यूलेटर और रिसीवर की रैखिक गुणवत्ता सुनिश्चित की जानी चाहिए। इसके अलावा, विभिन्न RF आवृत्तियों पर चलने पर सिस्टम के CSO मान भिन्न हो सकते हैं।
3. कृपया ध्यान दें कि इनपुट ऑप्टिकल पावर चयनित बायस बिंदु पर ऑप्टिकल पावर के अनुरूप नहीं है। यह उस अधिकतम ऑप्टिकल पावर को संदर्भित करता है जिसे मॉड्यूलेटर कंट्रोलर को तब निर्यात कर सकता है जब बायस वोल्टेज −Vπ से +Vπ के बीच हो।
प्रयोक्ता इंटरफ़ेस
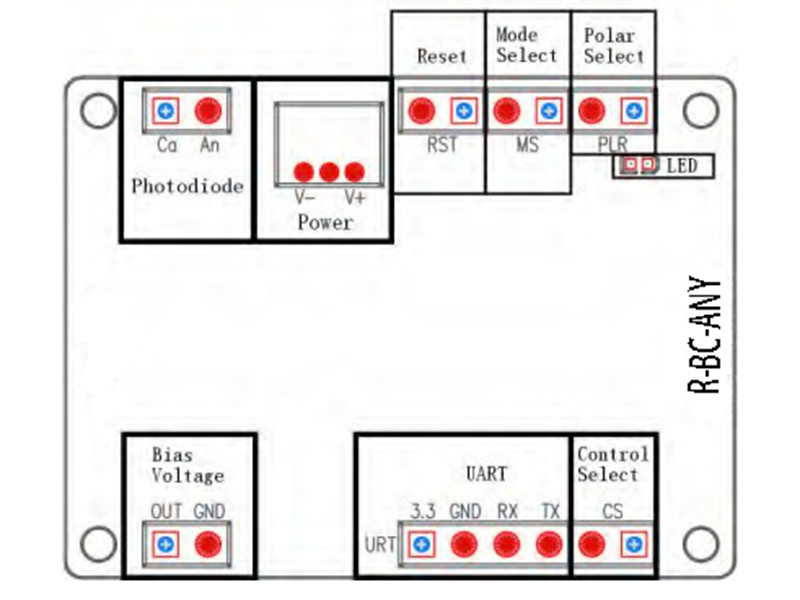
चित्र 5. संयोजन
| समूह | संचालन | स्पष्टीकरण |
| फोटोडायोड 1 | पीडी: एमजेडएम फोटोडायोड के कैथोड को कनेक्ट करें | फोटोकरंट फीडबैक प्रदान करें |
| GND: MZM फोटोडायोड के एनोड को कनेक्ट करें | ||
| शक्ति | बायस कंट्रोलर के लिए विद्युत स्रोत | V-: ऋणात्मक इलेक्ट्रोड को जोड़ता है |
| V+: धनात्मक इलेक्ट्रोड को जोड़ता है | ||
| मध्य प्रोब: ग्राउंड इलेक्ट्रोड को जोड़ता है | ||
| रीसेट करें | जम्पर डालें और 1 सेकंड बाद बाहर निकालें | कंट्रोलर को रीसेट करें |
| मोड चयन | जम्पर को डालें या बाहर निकालें | जम्पर के बिना: नल मोड; जम्पर के साथ: क्वाड मोड |
| पोलर सेलेक्ट2 | जम्पर को डालें या बाहर निकालें | जम्पर के बिना: धनात्मक ध्रुवीय; जम्पर के साथ: ऋणात्मक ध्रुवीय |
| बायस वोल्टेज | MZM बायस वोल्टेज पोर्ट से कनेक्ट करें | OUT और GND मॉड्यूलेटर के लिए बायस वोल्टेज प्रदान करते हैं। |
| नेतृत्व किया | लगातार चालू | स्थिर अवस्था में कार्य करना |
| हर 0.2 सेकंड में चालू-बंद या बंद-चालू करें | डेटा को संसाधित करना और नियंत्रण बिंदु की खोज करना | |
| हर 1 सेकंड में चालू-बंद या बंद-चालू करें | इनपुट ऑप्टिकल पावर बहुत कमजोर है | |
| हर 3 सेकंड में चालू-बंद या बंद-चालू करें | इनपुट ऑप्टिकल पावर बहुत अधिक है | |
| यूएआरटी | यूएआरटी के माध्यम से नियंत्रक को संचालित करें | 3.3: 3.3V संदर्भ वोल्टेज |
| जीएनडी: ग्राउंड | ||
| RX: नियंत्रक का रिसीव | ||
| TX: नियंत्रक का प्रेषण | ||
| नियंत्रण चयन | जम्पर को डालें या बाहर निकालें | जम्पर के बिना: जम्पर नियंत्रण; जम्पर के साथ: यूएआरटी नियंत्रण |
1. कुछ MZ मॉड्यूलेटर में आंतरिक फोटोडायोड होते हैं। कंट्रोलर सेटअप के लिए कंट्रोलर के फोटोडायोड या मॉड्यूलेटर के आंतरिक फोटोडायोड में से किसी एक को चुनना चाहिए। प्रयोगशाला प्रयोगों के लिए कंट्रोलर के फोटोडायोड का उपयोग करने की सलाह दी जाती है, इसके दो कारण हैं। पहला, कंट्रोलर का फोटोडायोड उच्च गुणवत्ता वाला होता है। दूसरा, इनपुट प्रकाश की तीव्रता को समायोजित करना आसान होता है। ध्यान दें: यदि मॉड्यूलेटर के आंतरिक फोटोडायोड का उपयोग कर रहे हैं, तो सुनिश्चित करें कि फोटोडायोड का आउटपुट करंट इनपुट पावर के बिल्कुल समानुपाती हो।
2. पोलर पिन का उपयोग नल कंट्रोल मोड (मोड सेलेक्ट पिन द्वारा निर्धारित) या क्वाड+ में पीक और नल के बीच कंट्रोल पॉइंट को स्विच करने के लिए किया जाता है।
और क्वाड कंट्रोल मोड में क्वाड-। यदि पोलर पिन का जम्पर नहीं लगा है, तो नल मोड में कंट्रोल पॉइंट नल होगा या क्वाड मोड में क्वाड+ होगा। आरएफ सिस्टम का एम्प्लीट्यूड भी कंट्रोल पॉइंट को प्रभावित करेगा। जब कोई आरएफ सिग्नल नहीं होता है या आरएफ सिग्नल का एम्प्लीट्यूड कम होता है, तो कंट्रोलर वर्क पॉइंट को एमएस और पीएलआर जम्पर द्वारा चुने गए सही पॉइंट पर लॉक कर सकता है। जब आरएफ सिग्नल का एम्प्लीट्यूड एक निश्चित सीमा से अधिक हो जाता है, तो सिस्टम का पोलर बदल जाएगा। इस स्थिति में, पीएलआर हेडर विपरीत स्थिति में होना चाहिए, यानी यदि जम्पर नहीं लगा है तो उसे लगा देना चाहिए या यदि लगा है तो उसे निकाल देना चाहिए।
विशिष्ट अनुप्रयोग
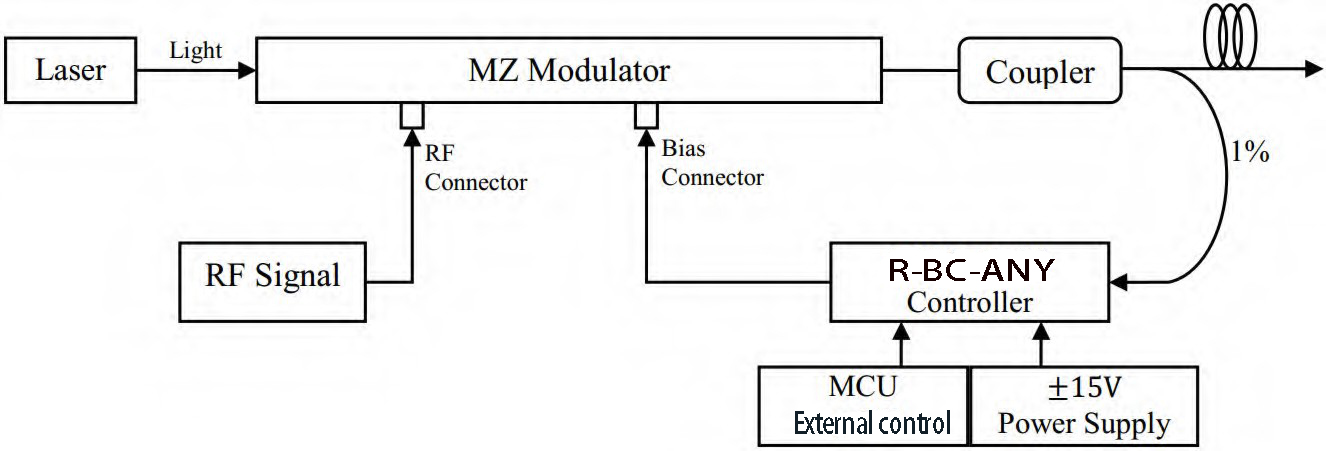
यह कंट्रोलर इस्तेमाल करने में आसान है।
चरण 1. कपलर के 1% पोर्ट को कंट्रोलर के फोटोडायोड से कनेक्ट करें।
चरण 2. कंट्रोलर के बायस वोल्टेज आउटपुट को (एसएमए या 2.54 मिमी 2-पिन हेडर के माध्यम से) मॉड्यूलेटर के बायस पोर्ट से कनेक्ट करें।
चरण 3. नियंत्रक को +15V और -15V डीसी वोल्टेज प्रदान करें।
चरण 4. कंट्रोलर को रीसेट करें और यह काम करना शुरू कर देगा।
नोट: कंट्रोलर को रीसेट करने से पहले सुनिश्चित करें कि पूरे सिस्टम का आरएफ सिग्नल चालू हो।
रोफ़िया ऑप्टोइलेक्ट्रॉनिक्स व्यावसायिक इलेक्ट्रो-ऑप्टिक मॉड्यूलेटर, फ़ेज़ मॉड्यूलेटर, इंटेंसिटी मॉड्यूलेटर, फोटोडिटेक्टर, लेज़र लाइट सोर्स, डीएफबी लेज़र, ऑप्टिकल एम्पलीफायर, ईडीएफए, एसएलडी लेज़र, क्यूपीएसके मॉड्यूलेशन, पल्स लेज़र, लाइट डिटेक्टर, बैलेंस्ड फोटोडिटेक्टर, लेज़र ड्राइवर, फाइबर ऑप्टिक एम्पलीफायर, ऑप्टिकल पावर मीटर, ब्रॉडबैंड लेज़र, ट्यूनेबल लेज़र, ऑप्टिकल डिटेक्टर, लेज़र डायोड ड्राइवर और फाइबर एम्पलीफायर की एक विस्तृत श्रृंखला प्रदान करता है। हम अनुकूलन के लिए कई विशिष्ट मॉड्यूलेटर भी प्रदान करते हैं, जैसे कि 1*4 ऐरे फ़ेज़ मॉड्यूलेटर, अल्ट्रा-लो वीपीआई और अल्ट्रा-हाई एक्सटिंक्शन रेशियो मॉड्यूलेटर, जिनका उपयोग मुख्य रूप से विश्वविद्यालयों और संस्थानों में किया जाता है।
हमें उम्मीद है कि हमारे उत्पाद आपके और आपके शोध के लिए उपयोगी साबित होंगे।


